-

微信號(hào):chinaagv
關(guān)注官方微信
m.chinaagv.com手機(jī)掃碼看新聞
-
- 求購(gòu)
- 發(fā)布求購(gòu)
- 管理求購(gòu)
- 添加收藏
- 關(guān)于我們
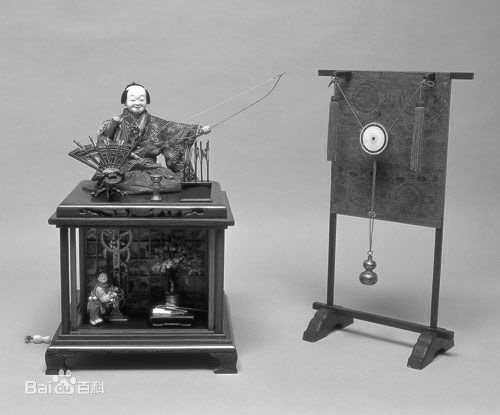
早在18世紀(jì),日本人若井源大衛(wèi)門和源信便在前人的基礎(chǔ)上,利用鯨魚須制作的發(fā)條和彈簧,將自動(dòng)機(jī)器玩偶升級(jí)為可為客人端茶送水的“原始機(jī)器人”。
它會(huì)雙手捧著茶盤,如果把茶杯放在茶盤上,它就會(huì)向前走,把茶端給客人。客人取下茶杯時(shí),它會(huì)自動(dòng)停止,等客人喝完茶把茶杯放回茶盤上時(shí),它就又轉(zhuǎn)回原來的地方。想想這個(gè)場(chǎng)景還是非常有樂趣的。就像這個(gè)圖:
雖然以當(dāng)時(shí)的技術(shù),不可能實(shí)現(xiàn)嚴(yán)格意義上的“人機(jī)協(xié)作”,甚至當(dāng)時(shí)的玩偶都不能算概念上的“機(jī)器人”,但我們至少可以肯定,人類在對(duì)于機(jī)器人的“人機(jī)協(xié)作”的探索工作來源已久,對(duì)于機(jī)器人的智能化發(fā)展的涉獵心始終未停止過。
上世紀(jì)50年代末,美國(guó)科學(xué)家德沃爾與約瑟夫共同開發(fā)制造出全世界第一臺(tái)工業(yè)機(jī)器人,開啟了第一代工業(yè)機(jī)器人的先河。此時(shí)的工業(yè)機(jī)器人處于第一代,這時(shí)的機(jī)器人還離不開“人”的操作,只能在控制器的“監(jiān)督”下完成某些指定的工作,我們稱其為“示教再現(xiàn)”。
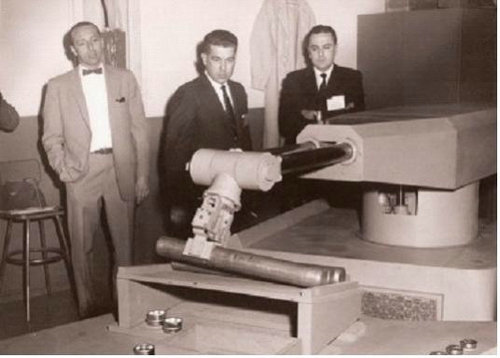
(喬治·德沃爾(右)、約瑟夫·恩格爾伯格和unimation機(jī)器人)
雖然工業(yè)機(jī)器人從誕生發(fā)展到現(xiàn)在,已經(jīng)有50多年的歷史,但是現(xiàn)在產(chǎn)業(yè)化的工業(yè)機(jī)器人一直未能脫離傳統(tǒng)的、基于預(yù)編程/遙操作型的機(jī)器類型。而近年來,由于技術(shù)的演進(jìn)、人類不斷探知的欲望,以及產(chǎn)業(yè)工人的需求等因素,越來越多的產(chǎn)學(xué)研用各方面的人加入到推進(jìn)下一代工業(yè)機(jī)器人的大軍中。
目前,雖然人機(jī)協(xié)作機(jī)器人只占到工業(yè)機(jī)器人整體規(guī)模的5%,但其未來發(fā)展勢(shì)頭不可小覷,也證明未來發(fā)展市場(chǎng)廣闊。
這5%當(dāng)中,最出名的便是美國(guó)再思考機(jī)器人公司(Rethink Robotics)。當(dāng)然,任何先進(jìn)的技術(shù)產(chǎn)品都離不開行業(yè)技術(shù)“大牛”。該公司的創(chuàng)始人是羅德尼·布魯克斯(Rodney Brooks),是不是感覺有些眼熟呢?沒錯(cuò),他正是著名的服務(wù)機(jī)器人(確切的說是掃地機(jī)器人)美國(guó)iRobot公司的聯(lián)合創(chuàng)始人。就是下面這位:
在他的幫助下,iRobot開發(fā)出了火爆的Roomba系列機(jī)器人。這位從MIT計(jì)算機(jī)科學(xué)與人工智能實(shí)驗(yàn)室退休的澳大利亞科學(xué)院院士是機(jī)器人學(xué)界的權(quán)威,他強(qiáng)調(diào)的理念是“自下而上”的環(huán)境識(shí)別與適應(yīng)。他一手創(chuàng)立了再思考機(jī)器人公司,并兼任首席技術(shù)官。在他的領(lǐng)導(dǎo)下,再思考發(fā)布了兩款重量級(jí)產(chǎn)品——Baxter(雙臂)和Sawyer(單臂)。

(Baxter和Sawyer)
其實(shí),人機(jī)協(xié)作機(jī)器人(不管是單臂還是雙臂)與傳統(tǒng)工業(yè)機(jī)器人最大的區(qū)別就在于它們可以“協(xié)作”——他們可以配合在工人“手把手”的引領(lǐng)之下“安全地”執(zhí)行任務(wù)所需的動(dòng)作并記住他們,工人們幾分鐘就可對(duì)該種機(jī)器人“上手”。而這和傳統(tǒng)的工業(yè)機(jī)器人不一樣,不需要層層防護(hù),將人與機(jī)器人隔離開,而且不必經(jīng)過對(duì)編程、機(jī)械等相關(guān)內(nèi)容系統(tǒng)的培訓(xùn)便可使用。這對(duì)于工廠來說,大大提高了效率。這樣的便捷性也意味著人機(jī)協(xié)作機(jī)器人不再需要軟件工程師,不需要編程操作,在帶給人類方便的同時(shí),他們也能完成更復(fù)雜、更精確的任務(wù),即靈巧作業(yè)。
當(dāng)然,不光是再思考機(jī)器人公司,很多產(chǎn)業(yè)內(nèi)相關(guān)企業(yè)均向人機(jī)協(xié)作型機(jī)器人拋出了橄欖枝。丹麥優(yōu)傲機(jī)器人公司(Universal robots)發(fā)布了三款人機(jī)協(xié)作機(jī)器人——UR3、UR5、UR10,三款機(jī)器人均為單臂,負(fù)載有所不同;位列機(jī)器人“四大家族”的德國(guó)庫(kù)卡機(jī)器人公司(KUKA)也推出其首款輕型人機(jī)協(xié)作7軸機(jī)器人LBR iiwa;而“四大家族”的另一位成員瑞士ABB公司也于近期收購(gòu)了GomTec公司,旗下的Roberta協(xié)作式機(jī)器人很可能成為行業(yè)領(lǐng)軍產(chǎn)品……
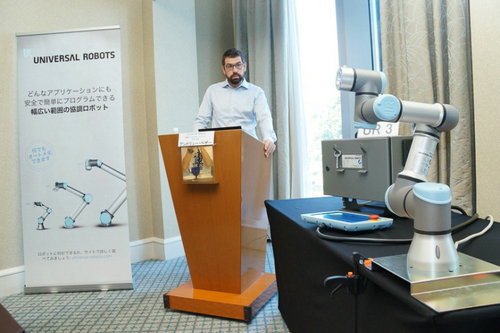
(Universal robots發(fā)布的UR3)
人機(jī)協(xié)作機(jī)器人之所以受到市場(chǎng)的強(qiáng)烈熱捧,除了各國(guó)對(duì)于其扶持力度加大之外,更關(guān)鍵的是,相對(duì)于傳統(tǒng)機(jī)器人固化、適應(yīng)性差等特點(diǎn),人機(jī)協(xié)作機(jī)器人能夠?qū)崿F(xiàn)定制化生產(chǎn),滿足多品種、小批量、柔性、快速等傳統(tǒng)工業(yè)機(jī)器人難以涉及的新型制造模式。
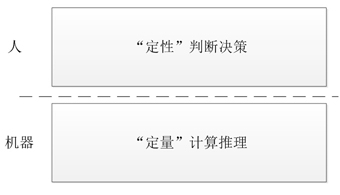
實(shí)際上,人機(jī)協(xié)作由機(jī)器實(shí)現(xiàn)簡(jiǎn)單的操作,并運(yùn)行底層的自動(dòng)化控制,而“人”實(shí)現(xiàn)上層的監(jiān)督控制、任務(wù)安排、軌跡設(shè)定和相關(guān)操作等。既然是人機(jī)協(xié)作,那么無可厚非,整個(gè)任務(wù)是由“人”與“機(jī)器”協(xié)同完成的。既然是協(xié)同完成任務(wù),那么就需要對(duì)任務(wù)有明確的分工。在人機(jī)協(xié)作系統(tǒng)中,人主要負(fù)責(zé)“定性”判斷決策,而機(jī)器則負(fù)責(zé)“定量”計(jì)算推理,二者相結(jié)合,缺一不可。
人機(jī)協(xié)作的深層內(nèi)涵是“人機(jī)智能融合”,它代表“人”與“機(jī)器”需要共同完成指定任務(wù),在完成任務(wù)的過程中二者行為還要保持步調(diào)一致,并且兩者在意識(shí)層面還需始終協(xié)調(diào)。而這需要對(duì)傳統(tǒng)工業(yè)機(jī)器人進(jìn)行大幅度改良,必須提升機(jī)器感知、人機(jī)共融等多項(xiàng)技術(shù)水平。
因此,我們可以看到,人機(jī)協(xié)作機(jī)器人雖說功能強(qiáng)大,但卻不容易實(shí)現(xiàn),且即便是商業(yè)化生產(chǎn)的成品,規(guī)模也十分有限。
要想實(shí)現(xiàn)人機(jī)共融,必須要解決好人機(jī)交互的問題。實(shí)現(xiàn)人機(jī)交互的首要任務(wù)便是建立一個(gè)能夠?qū)崿F(xiàn)“人”與“機(jī)器”信息傳輸?shù)那溃灰軌驅(qū)崿F(xiàn)傳遞并轉(zhuǎn)換信息的接口作用即可。在機(jī)器人系統(tǒng)中,人機(jī)接口通常是操縱面板或圖形用戶界面。在人機(jī)協(xié)作機(jī)器人當(dāng)中阻抗控制來感受力覺,使工人能夠感知機(jī)器人與加工部件之間的機(jī)械接觸。當(dāng)然,人機(jī)交互還需要可靠地安全機(jī)制,以保障工人的安全。
從大的層面看,人機(jī)交互在技術(shù)方面的發(fā)展主要有兩個(gè)方面:
一是單峰的人機(jī)交互系統(tǒng),比如基于視覺、聽覺、機(jī)械接觸等;
二是多通道人機(jī)交互模式的整合,通過幾種效應(yīng)通道的協(xié)作,減少單個(gè)通道的工作負(fù)擔(dān),提高了交互的可靠性和工作效率。
人機(jī)協(xié)作已經(jīng)成為工業(yè)機(jī)器人下一階段的重點(diǎn)發(fā)展趨勢(shì),是各大相關(guān)企業(yè)、院校、科研機(jī)構(gòu)的“必爭(zhēng)之地”,他們紛紛加大在該領(lǐng)域的投入、研發(fā)力量,力爭(zhēng)在下一代機(jī)器人全面來臨之前形成技術(shù)壁壘,占領(lǐng)制高點(diǎn)。
2024-08-30 02:45
2024-04-15 09:16
2024-04-09 08:56
2024-04-07 08:07
2024-03-11 11:00
2023-08-17 09:41
2023-08-14 09:40
2021-12-22 11:57
2021-07-30 08:50
2021-07-27 08:53






















 粵公網(wǎng)安備 44010602004352號(hào)
粵公網(wǎng)安備 44010602004352號(hào)